















































BibTex
@inproceedings{Vinayak:2015:10.20380/GI2015.07,
author = {Vinayak, Vinayak and Ramani, Karthik},
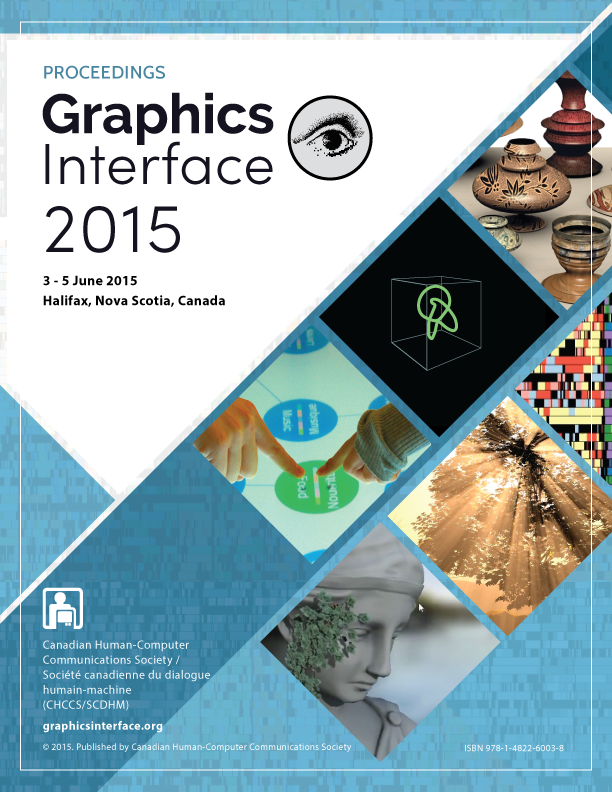
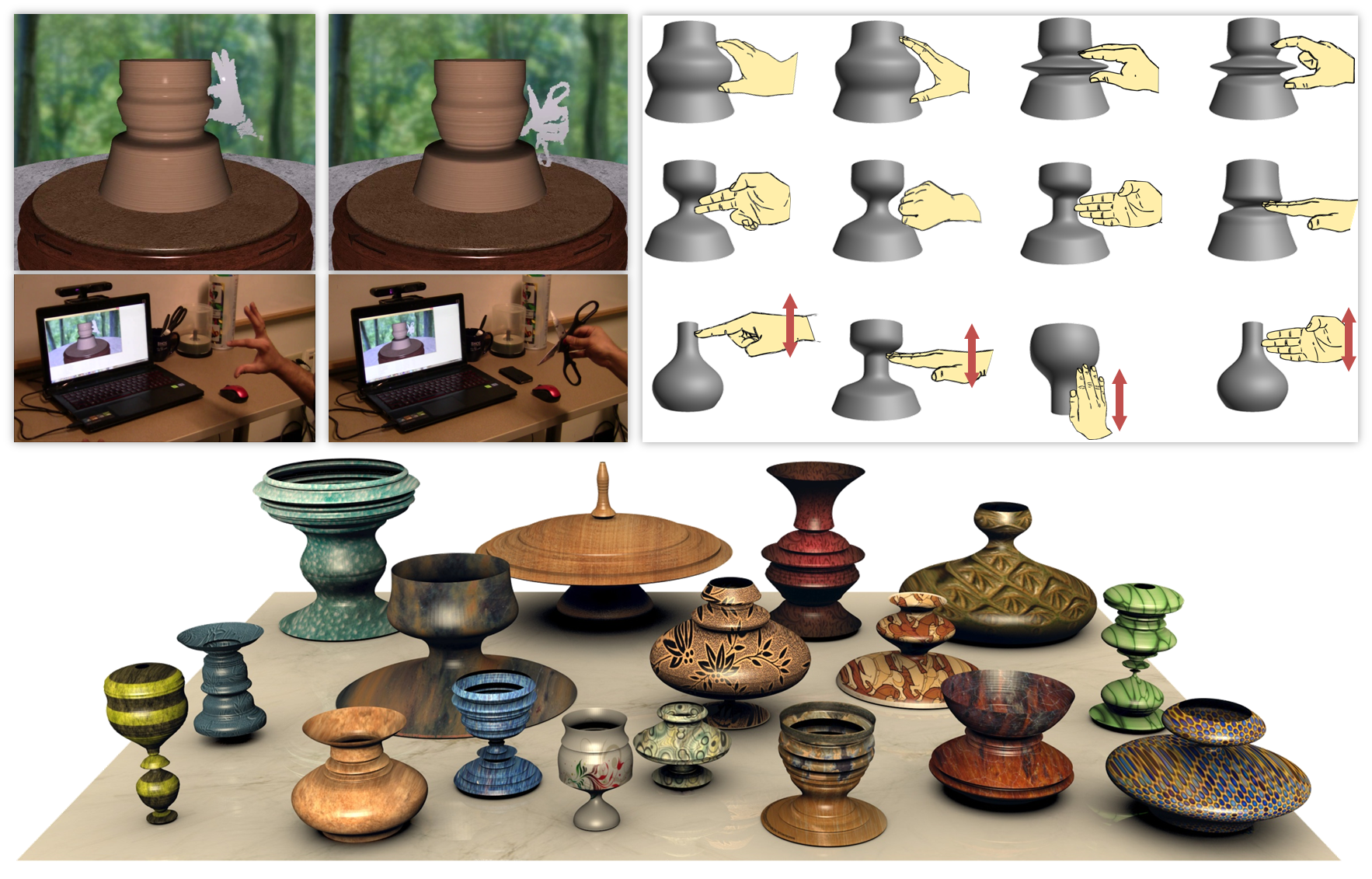
title = {Hand grasp and motion for intent expression in mid-air virtual pottery},
booktitle = {Proceedings of Graphics Interface 2015},
series = {GI 2015},
year = {2015},
issn = {0713-5424},
isbn = {978-1-4822-6003-8},
location = {Halifax, Nova Scotia, Canada},
pages = {49--57},
numpages = {9},
doi = {10.20380/GI2015.07},
publisher = {Canadian Human-Computer Communications Society},
address = {Toronto, Ontario, Canada},
}Supplementary Media
{kind=link}
Abstract
We describe the design and evaluation of a geometric interaction technique for bare-hand mid-air virtual pottery. We model the shaping of a pot as a gradual and progressive convergence of the pot-profile to the shape of the user's hand represented as a point-cloud (PCL). Our pottery-inspired application served as a platform for systematically revealing how users use their hands to express the intent of deformation during a pot shaping process. Through our approach, we address two specific problems: (a) determining start and end of deformation without explicit clutching and declutching, and (b) identifying user's intent by characterizing grasp and motion of the hand on the pot. We evaluated our approach's performance in terms of intent classification, users' behavior, and users' perception of controllability. We found that the expressive capability of hand articulation can be effectively harnessed for controllable shaping by organizing the deformation process in broad classes of intended operations such as pulling, pushing and fairing. After minimal practice with the pottery application, users could figure out their own strategy for reaching, grasping and deforming the pot. Further, the use of PCL as mid-air input allows for using common physical objects as tools for pot deformation. Users particularly enjoyed this aspect of our method for shaping pots.